ネットワーク化制御工学
第一回
- 力覚通信
- ネットワークを通じて遠隔に力を伝える
- 力のフィードバックもある
- 遅延で制御が不安定
- メカニカルハウリング: 力のハウリング
- 安定化の研究
- 他の感覚, 遠隔協調作業, 触覚
通信品質劣化の元での不安定現象
- マスター・スレーブ間のやりとりの信号に変換を加えて安定化と快適化を図る
- 200msの遅延があっても適切な変換入れることで運べるように
着眼点: 制御における情報の役割
基盤となるネットワークの性能・品質とそれを用いて動作するもの(e.g. ネットワークを用いて動作するアプリケーション)との関係に着目する
制御がネットワークを介して行われるようになるとネットワークの性能、品質が制御に影響することを具体的な技術課題に即して理解
ラプラス変換とか
後半は文献を指定しレポート, 自分はこう考える(批判的な視点)
- 通信ネットワークはどのようなシステムか, 通信ネットワークの性能品質とは
制御の基本概念
- 参考書籍: 加藤一郎「制御工学の実際」
- 最初はからくり=フィードバックがなかった(=フィードフォワード)
- 速度を上がりすぎないように(=フィードバック制御)の登場
- 制御は別エネルギーから使ってもいい
第二回
通信網とは?, 品質・性能とは
- 電気がないときも通信: 狼煙, 手旗(半日), 飛脚リレー(1.5-3日)
- 物体の伝達: 物を運ぶ直接技術 → 組み合わせて機能
1対1 から 多対多 へ
- ネットワークはノード(は向き替えられる)とリンクからなる
- 木構造に(携帯電話と固定電話は中継系の構造同じ)
- 冗長性高めるためにループもつ
- 形成されて通信経路に使われたスイッチは他の経路に使えない(内部輻輳
呼制御(call): 呼: ひとつひとつの通信の要求
- 個別線信号方式: リクエストとデータが同じ
- 共通線信号方式: srcとdstの情報をもとに各ノードが聞きに行く
伝達ネットワークと制御ネットワークがある
回線交換とパケット交換
- 回線交換: 話していないときでも回線を占有
- パケット交換: 情報のあるときだけ回線を占有
→ パケットだと様々な情報を伝達するのが容易
ルータ = 交換機
携帯電話=回線交換
現在はどっちも混在
IP網
- 情報をパケット(ヘッダ + ペイロード)に分割し
- ルーターを死活監視(ハローパケット)し故障していたら迂回する機能
- PCM(パルス符号変調), 標本化とかの話
通信ネットワークの本質
- たくさんのユーザがいる
- 設備を共用
- 同じ規則で処理をする
- 自律分散処理
通信ネットワークの品質(Quality)と性能(Performance)
- 呼損: スループットが多くつながらない確率、応答時間 → 品質
- 遅延, 損失
平常時の品質が維持できなるときが故障
故障の発生のしやすさも品質 → ネットワーク信頼性
プロトコルスタック
第三回
通信ネットワークの品質がアプリケーションに及ぼす影響の一つである主観品質評価法 について
通信遅延は無視できない
平常時でも接続損失(呼損)を0にすることはできない(ex 1%)ので故障ではない
ネットワーク性能
- パケット遅延
- 遅延ゆらぎ
- パケット損失
- (伝送速度) → ネットワークのグレード
品質が保証される/されない NW
交換ネットワーク ↔ パケットネットワーク
どのような関係?
IP電話はパケットで音声やり取りするので接続数に限界はないが性能落ちる
伝送品質の設計
- 最終的には人間の良し悪しで決まる(聞こえ具合)
- それを元に物理的パラメータを変化
主観品質評価法
- MOS(平均オピニオン値): 0-4の5段階で人間に調査(ave 2.5でよい)
- 明瞭性(発音が聞き取れる)・ラウドネス(大きさ)・自然性(自然な会話ができる) → 遅延
- 音に比べて映像が遅れる場合違和感を感じる
- 客観品質評価法(R値, PSQM値)もあるが主観が基本
→ 以上は回線網の話, IP網ではどうなるか
ネットワーク上のサービスによって
- ストリーム型通信 → 遅延
- ブロック型通信 → 誤り率, スループット
- トランザクション型通信
が大事(品質の評価軸が違う)
ネットワークだけでなくクライアント実装(バッファの容量等)にも影響する
→ 通信事業者以外が頑張る余地もある
音声符号圧縮技術
PCMから始まり
人間の知覚特性をもとに圧縮等
5Gも光速による限界がある
これからは遅延のある力覚通信の話
第4回
- ネットワーク故障と社会的影響
平常時の信頼性要求(古い話)
災害時の通信の信頼性(新しい試み, 検討途上)
n + 1予備: 必要数 n 個に対して 1個の予備 車のスペアタイヤ
信頼性の目標の’決定: 様々な故障要因があるので複雑
適当な規則 局所的な設計を積み重ねる
アクセス系(局所)の目標
中継網の目標
E2Eの目標
全国最遠系での不稼働率を目標値 → それぞれの区間の故障率を配分する
1970 10
テーマ: 信頼性目標値を通信ネットワークの社会的役割から決定することができるか?
1980
case1: あるエリアをn台でサービス
case2: あるエリアを1台でサービス
→ 一人あたりでみると信頼性は同じで問題ない
L(): 損失
U(): 信頼性目標値
U(x) = kx / L(x)
→ 信頼性目標は規模の平方根に反比例
L(x) = ax + bx
→ ルーターはパケットが混雑しているときこんな高度な選択をしているのか
減災効果を分担するのは方策か通信網か
このシミュレーションよって要求信頼性が出てくるのかは今の所わからない
第5回
- 力覚通信の資料を丁寧に紹介
- 力覚だけでなく触覚、嗅覚を伝達
M_t: master position
S_t: slave position
Cd: 抵抗係数 → 大きくすると安定化するが更に遅延
S_t = M_t - Cd(M_t - S_t_1)
Instability: 不安定
差分微分方程式を用いた定式化
Masterが指示した位置は遅れる
→ nステップ前の状態を用いて速度を決める
→ とりあえず固定して簡単な定式化
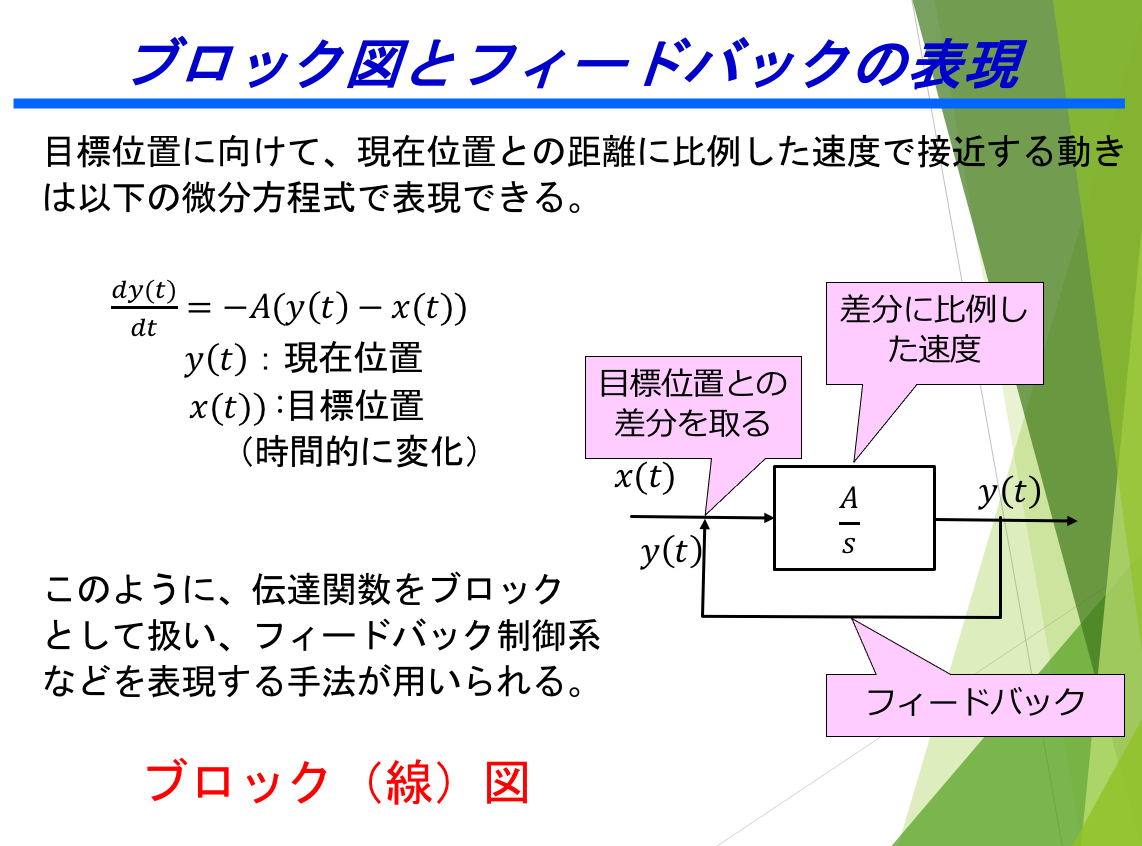
2つのフィードバックループ
- 位置の制御, 反力のフィードバックでの制御
Resistance: 1次の漸化式(1次遅れ要素)
Cdはローパスフィルターの一種である
→ 手の振動とかを吸収
V(t) が f(t) の関数の場合
→ 速度は現在位置の関数
差分微分方程式の基礎
19Cに船の操舵に使われた
dy/dt = -Ay(t -\delta)
y(t) = Ce^\lambda t ← 特性方程式
解から k = A\delta
安定性
k 負なら発散
0 ≤ k ≤ 1/e: 振動せず0に(Good QoS)
1/e < k < \pi/2 : 振動するが0に
else: 振動して発散
特性関数に着目する理由
→ 方程式が振動するか、安定するかどうかを見れる
target approachin
Cd 加えると2解微分, 2次の値が入る
→ 2時間数との交点
→ 実根解になる範囲が狭くなる
→ 振動しやすくなる -
→ だが、振動吸収する, メカニカルハウリングを抑制する + 一次遅れ要素Cdは必要
→ 人間特性をより調べなければ
力覚フィードバックへ及ぼすCdの影響
目的位置は頭の中にしかないので
→ 線形回帰で推定, (ステップごとに)
→ 振動を予測したが、実際は振動していなかった
→ 操作遅延があるとき操作者は無意識に振動を吸収しているのでは?
→ 操作の快適性と動作の安定性は別の話
宿題: 1~4の内容に関するレポート, 説得力のある論理を
~5/28, A4一枚
→ VRのハプティクスとか考えた
人間が制御する場合フィードバックを受けてから操作するまでに更に遅延が入るが考慮している?
第5回
topic
力覚通信の仕組み
位置の指定→ 力の検出 → 反力のフィードバック → IFでの力の再現
→ 静止したまま力を加えることはできない → 動かす(スプリングダンパーモデル)
-
スプリングダンパーモデル
→ 位置に依存するスプリング
→ 力に依存するダンパー
オブジェクトの従う物理法則から生じる力がマスターに返される
F_i = F(S_1, S_0)
物体の挙動は f(t, y, y’, y”, …) = 0
→ 何らかの制約に従う
- 制御の定式化
制御変数は F(t) 力
位置を指定することは速度を指定することと等価
制御変数 V は y, … と F(t)の関数
VとFの関係は難しい
モデル化: 外力F_1と反力F_2に分ける
通信遅延があると \delta 時間前のデータを参照
? レイテンシを考慮した制御はできないのか
when t in 0..\delta: 初期関数 g(x)
otherwise: -ky(t - \delta) (k: 人によっての反応速度;時定数)
遅延整数だと思ってたけど違うらしい
→ \delta は単位時間(例えば 200msとか)
ラプラス変換 とは
第7回
差分微分方程式
類似の分野は多くなる
→ 遅延フィードバック制御
初期値: 初期関数
の時は通常の微分方程式
ex.
数値例
遅延の影響は で決まる
k は遅延が時定数の何倍かを表す係数
→ 振動するかしないかが決める
解の挙動の予想
k < 0.4: div
0.4 < k < 1.5: tre, div
1.5: tre
< 1.5: tre, inf
y(t) = Ce^\lambda t と仮定すると
\lambda + Ae^{-\delta \lambda} = 0: 複数ある
特性方程式の解(根)が解の挙動を決める
ans: sum C_ie^{\lambda i t}
u = \lambda \delta
k = a \delta
u + ke^{-u} = 0
0 < k ≤ 1/\pi
線形常微分方程式
初期関数にも影響する
特殊な場合では厳密解をもとめられる
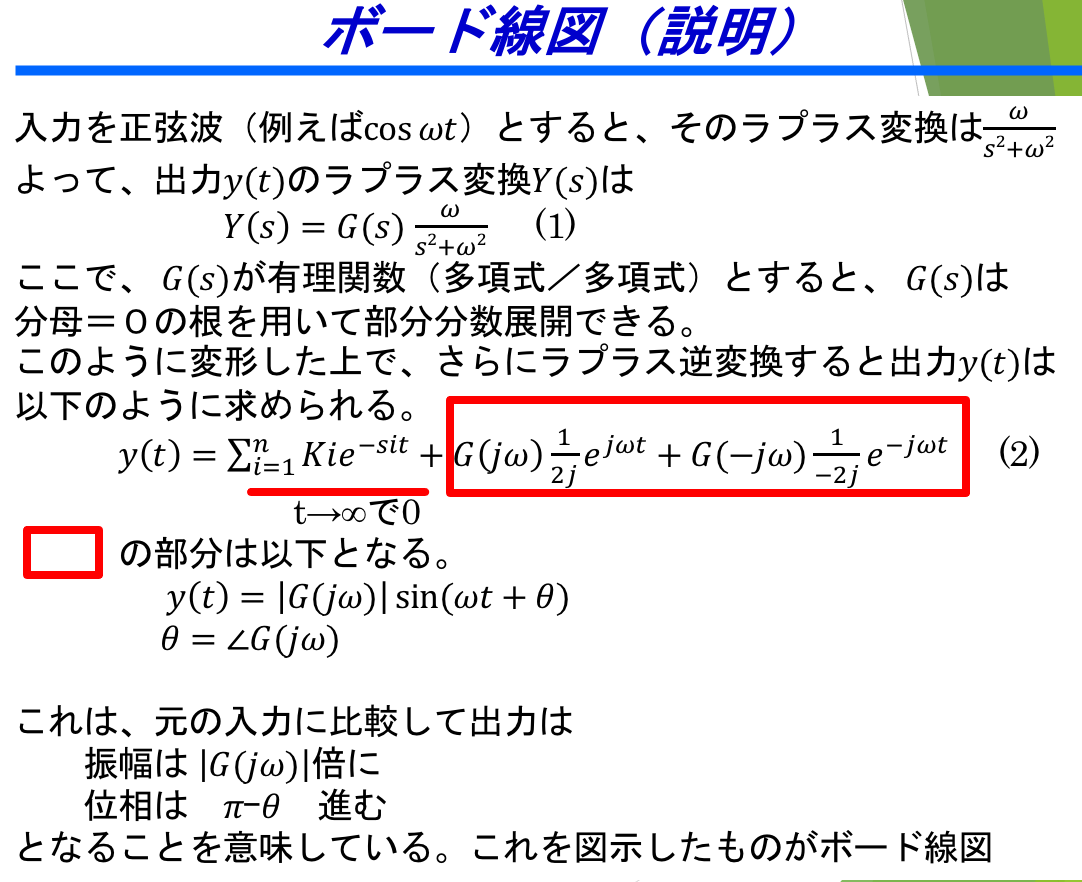
ラプラス変換
関数の和 → ラプラス変換の和(線形性)
元の関数を微分 → *s なる(高階微分方程式を多項式で表現できる)
ラプラス変換表
厳密解やるの古臭い?
遅延を克服する技術を作りたい
実は
\delta < 0.5 は 1/e = 0.368 でした.
快適性はまた別の話
第8回 古典制御におけるむだ時間制御の扱い
ラプラス変換とは
dy(t)/dt = Ay(t)
F(s) を f(t) のラプラス変換:
F(s) = \int 0→\inf f(t) e
F(s) = L{f(t)} とかく, 逆変換 L
ラプラス変換表でやる, 大文字はラプラス変換したもの
ce^{-st} の積分 → sが分母
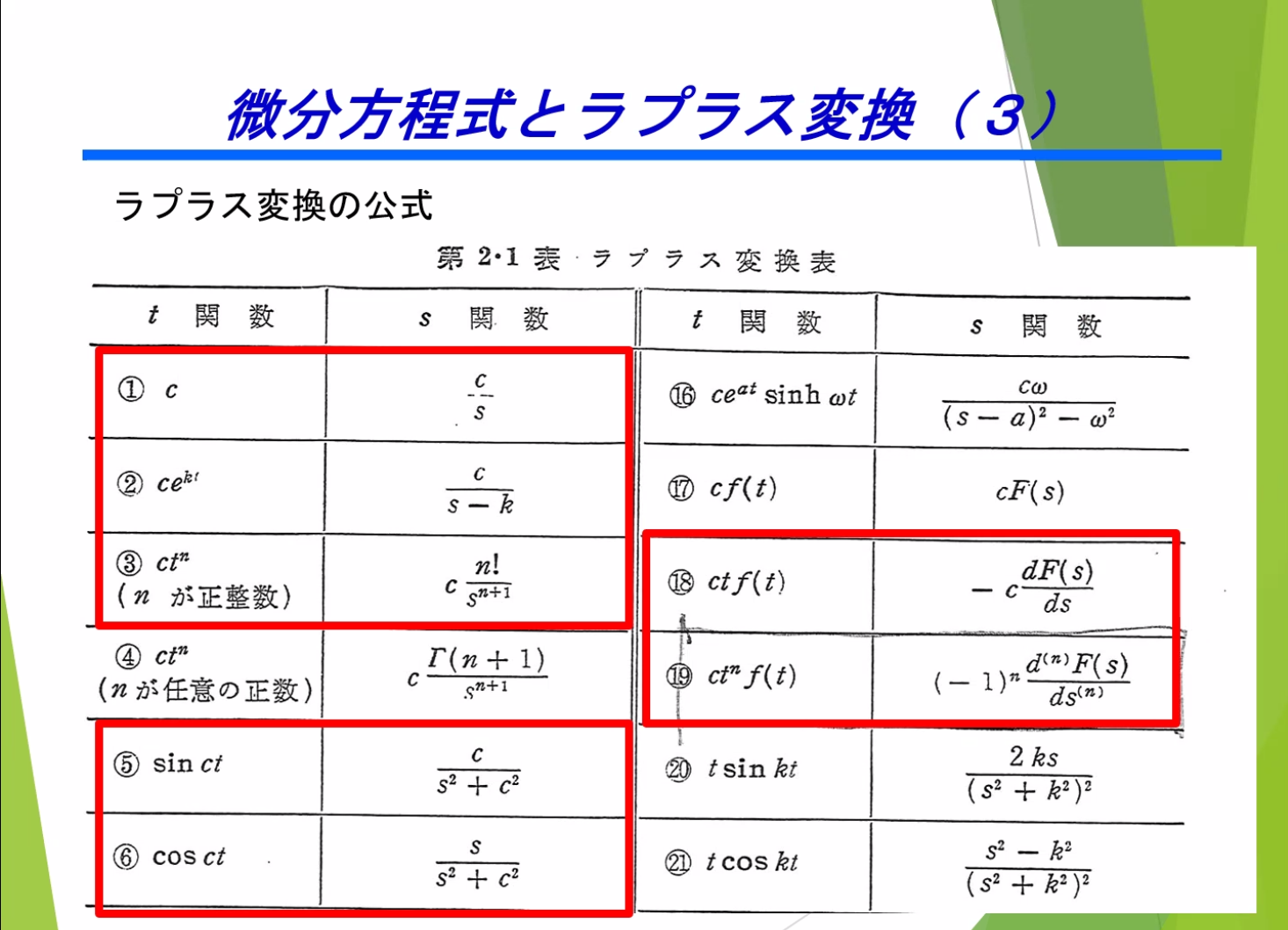
①は③でn=1のとき
(19) n次モーメント
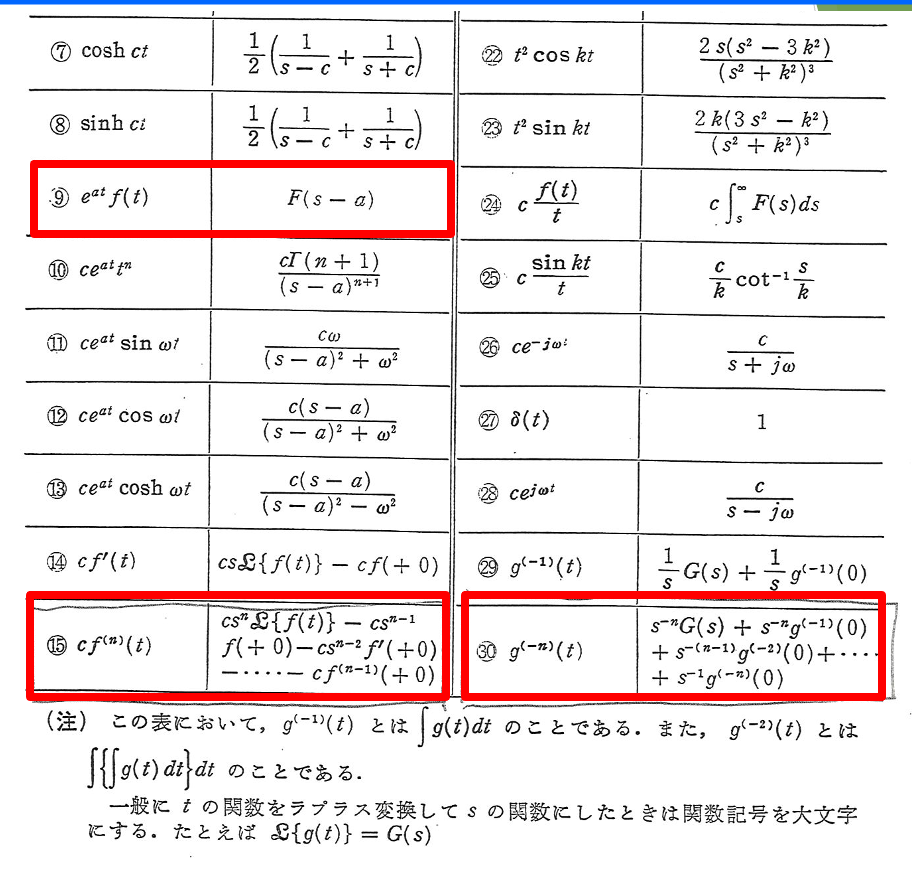
s=0とおくともとの関数を積分したものと同じ
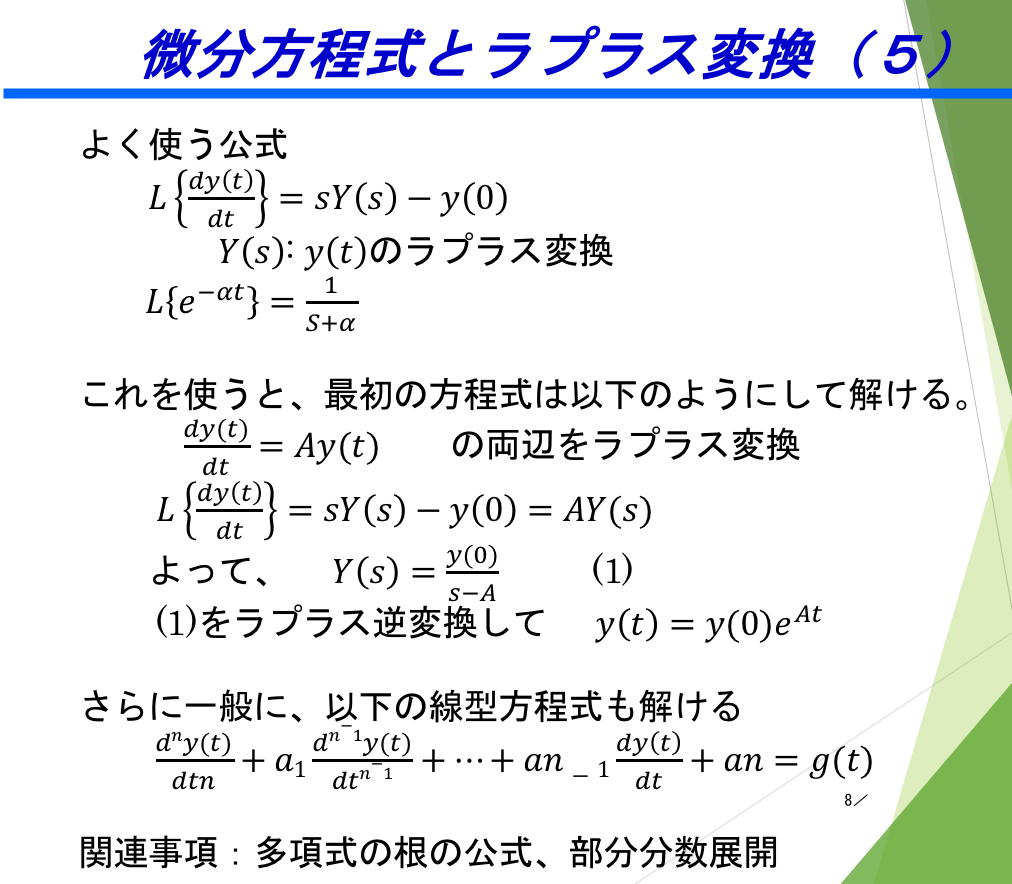
dy(t)/dt = Ay(t)
L{dy(t)/dt} = sY(s) - y(0)=AY(s)
よって Y(s) = y(0)/(s-A)
ラプラス逆変換して
y(t) = y(0)*exp(At)
複雑な例: 伝達関数
CR回路
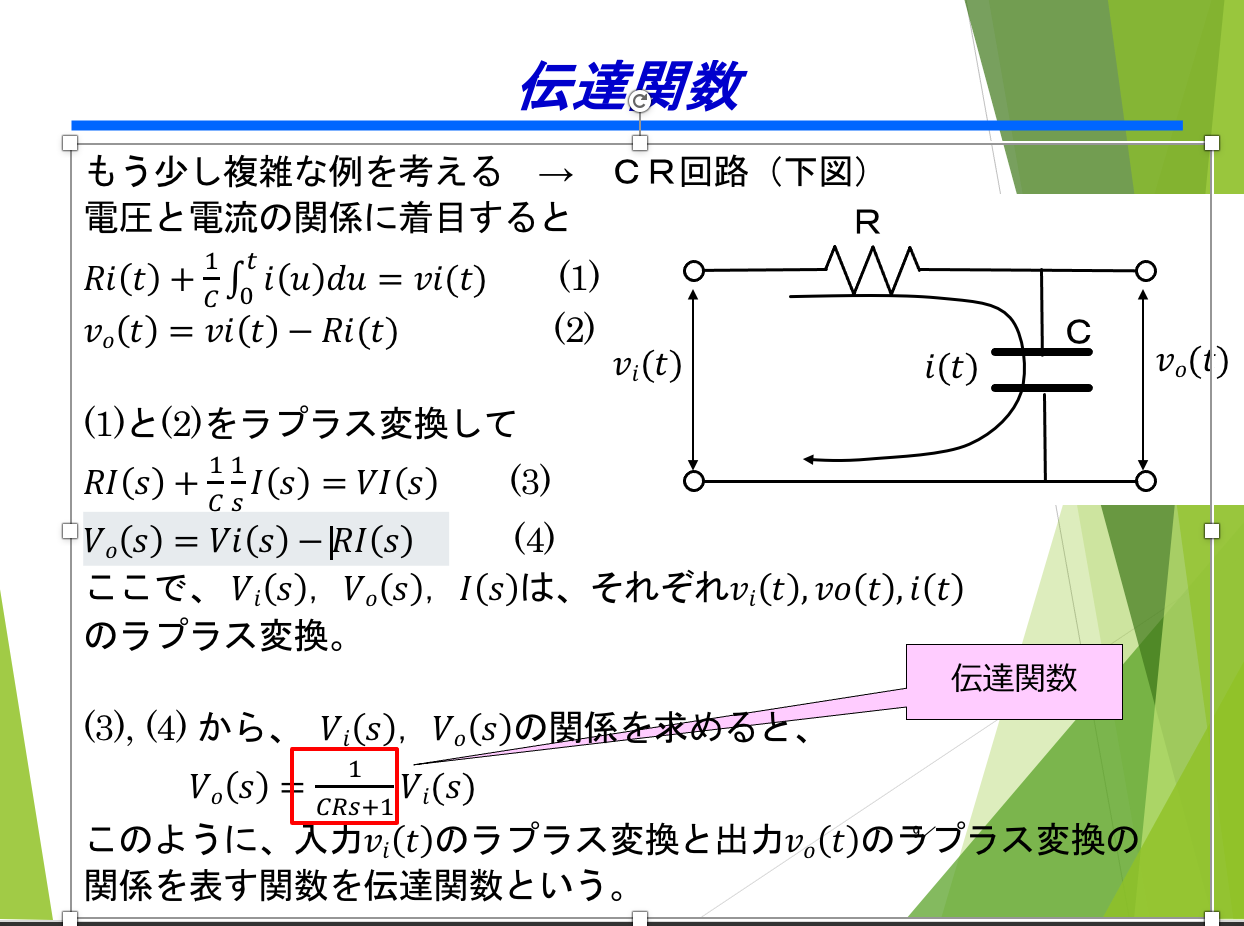
定常ではないので電流はtの関数 i(t)
- Ri(t) + 1/c \int 0→t i(u) du = vi(t)
- v_0(t) = vi(t) - Ri(t)
V_o(s) = 1/(CRs + 1) V_i(s) ラプラス変換の関係を伝達関数
ある特殊な入力 v_i(t) に対しての出力を調べる
- インディシャル応答: 最初に0→1に → 遅れてついてくる(=一次遅れ要素:係数が一次)
入力のラプラス変換は 1/s なので
V_0(s) = 1/s - 1/(CRs + 1)
ラプラス逆変換して
v_0(t) = 1 - exp{-1/CR}
- インパルス応答: 一瞬だけ高まる(ディラックの関数: 積分すると1, L(・) = 1)
- ランプ応答: 比例して増加
CR: 時定数 = どのくらい変化についてくるかの速さ
こういうの制御理論
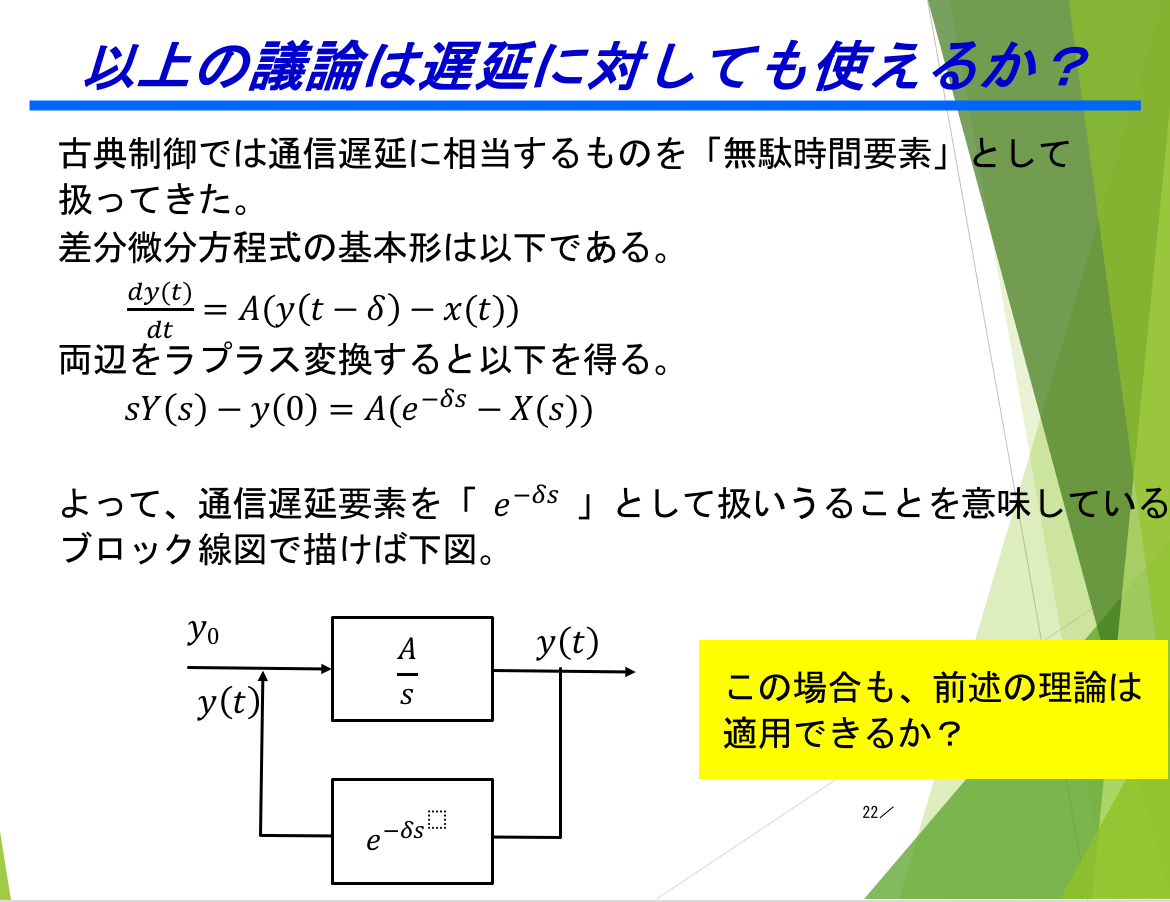
むだ時間要素
伝達関数の一つ
無駄時間要素 io: , 伝達関数: = 多項式じゃない(心配)
ボード線図の利用
伝達関数が有理関数のとき → ゲインと位相変化の2つで表現出来る.
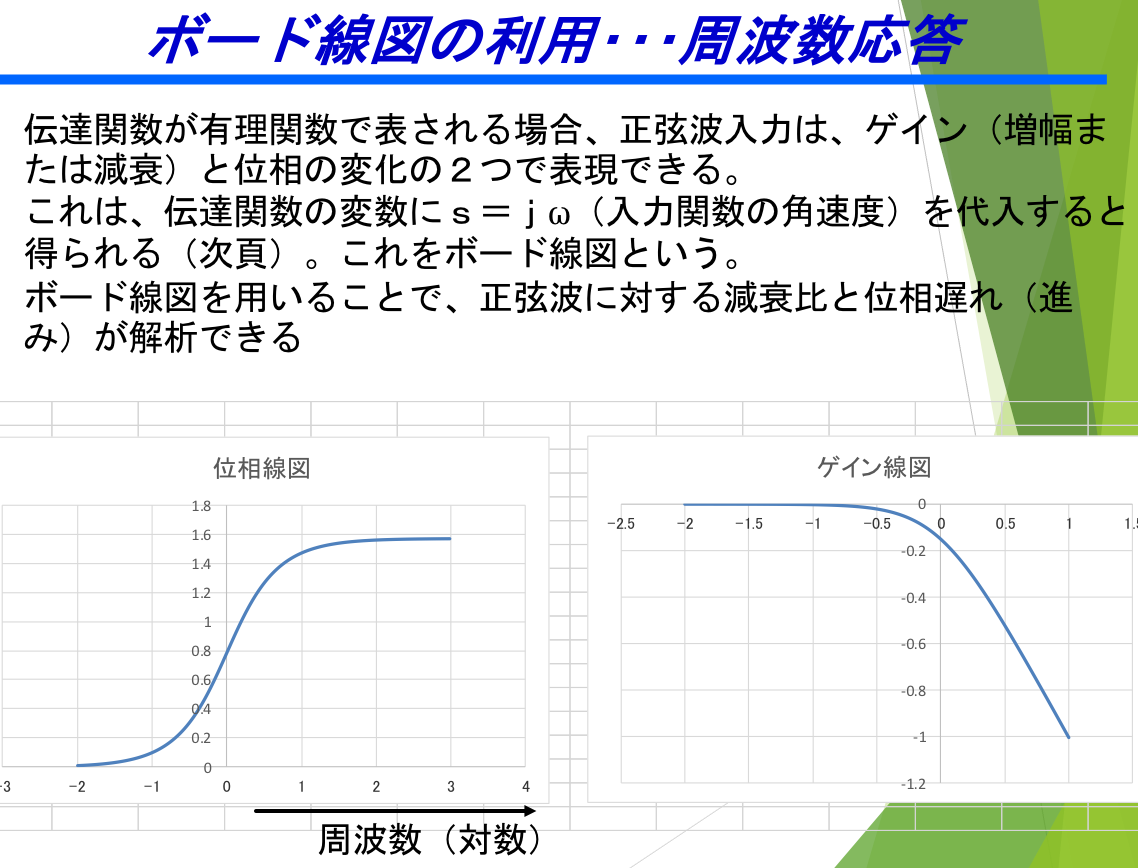
伝達関数に (\omega は入力関数の角速度)
ゲイン線図(xylog): 入力関数の絶対値
入力が急激(周波数が高く)になるほどおいきれなくて変化が減衰する(???) → 一次遅れ要素はローパス
ex. 手の震えとかを一次遅れ要素で除去する
位相線図:
ボード線図は安定した(時間が無限大)のときの特性を表している
ブロック図とフィードバックの表現
ボード線図で系が安定かどうかを判定
ベクトル線図
右回り: 安定
左回り: 不安定
→ 以上の理論を遅延に対して検討したい
→ 未解決
ボード線図, ベクトル線図は出せたがいまいち何していいかわからない
古典制御理論
→ そもそも線形問題に有効
- 安定時の解析, 過渡期に対しては余り
- -人間の要素を外乱とするか機械の一部とするか
固定電話になれた高年齢層の方が評価が甘い
2021-09-01
「ベイズ反応最適化」(Nature 2021)がわからないのでベイズ最適化をお勉強したメモ - magattacaのブログ
- 化学実験のパラメータ探索をベイズ最適化にやらせたら良かった話
- 制御理論, を python-control で使った
無料で実践ロバスト制御④ ーH∞制御問題を解くー - manvaのエンジニアリング魂
https://twitter.com/shun0157/status/1432672458012696579